机器人与人工智能技术实验室依托意昂4招商智能机器人研究所和计算机应用研究所💔,长期从事机器人控制技术🧁、建模与优化控制、机器视觉和人工智能应用技术等领域的研究和技术开发工作。团队负责人李传江教授是意昂4招商智能机器人研究所所长🦓、计算机应用研究所所长👨👩👦、中国仪器仪表学会嵌入式仪表及系统技术分会常务理事⁉️、人工智能学会自主无人系统专业委员会委员👩🏼🏭、上海市仪器仪表学会理事。团队成员主持国家自然科学基金、上海市自然科学基金、上海市科委相关项目近10项🖖🏼,研究经费1500余万元🏄🏿。团队注重应用基础研究,突出技术开发和成果转化,授权和转让发明专利30余项,开发的产品在多家知名企业推广应用数万套,创造直接经济效益2亿多元📢。
团队累计培养研究生50余人,现有在读研究生35人,指导的研究生获得研究生电子设计竞赛和数学建模竞赛全国一等奖5项👨🏻🦼、二等奖和三等奖8项,市级以上竞赛奖励30余项,连续3年获得研究生电子设计竞赛全国总决赛一等奖🎵,并曾入选TOP10。
团队成员👩⚕️:李传江🏃🏻♀️、张崇明、何凤琴、朱燕飞、顾亚、张鼎逆、常湛源、吴杰🧔🏿♂️、尹仕熠、李昂🤽🏼♂️、李燕
主要研究方向⇢:
1⏰、智能机器人定位、导航及驱动控制技术
2🍇、康复机器人与智能人机交互技术
3、复杂系统建模与优化控制
4、压电精密驱动控制
5、人工智能生育力评估
代表性成果🤦♀️:
压电驱动系统建模与精密流体控制产品研发⁉️,发表该方向论文4篇🧑🏼💻,授权发明专利并转让3项,产业化推广数万套🖇,创造直接经济效益2亿多元🔼。
[1]Li C , You C , Gu Y* ,et al.Parameter Identification of the RBF-ARX Model Based On the Hybrid Whale Optimization Algorithm[J].IEEE Transactions on Circuits and Systems II: Express Briefs, PP[2024-04-04]. DOI:10.1109/TCSII.2024.3351848.

基于深度学习的精子检测与生育力评估技术研究与产品开发
[2] Chuanjiang Li, Wenjing Xia, Haozhi Han, Ang Li*, Ziming Qi, Chongming Zhang, Zhuming Wang, Yanfei Zhu, Erlei Zhi, Zheng Li, A novel approach for one-stage sperm detection using advanced multi-scale feature pyramid networks[J]. Biomedical Signal Processing and Control, 2024.
[3]李传江,谢斌,智二磊,李铮,张崇明.一种家用型精子检测装置和检测方法,ZL 202010450673.2,2023.

精子检测热激活对比图
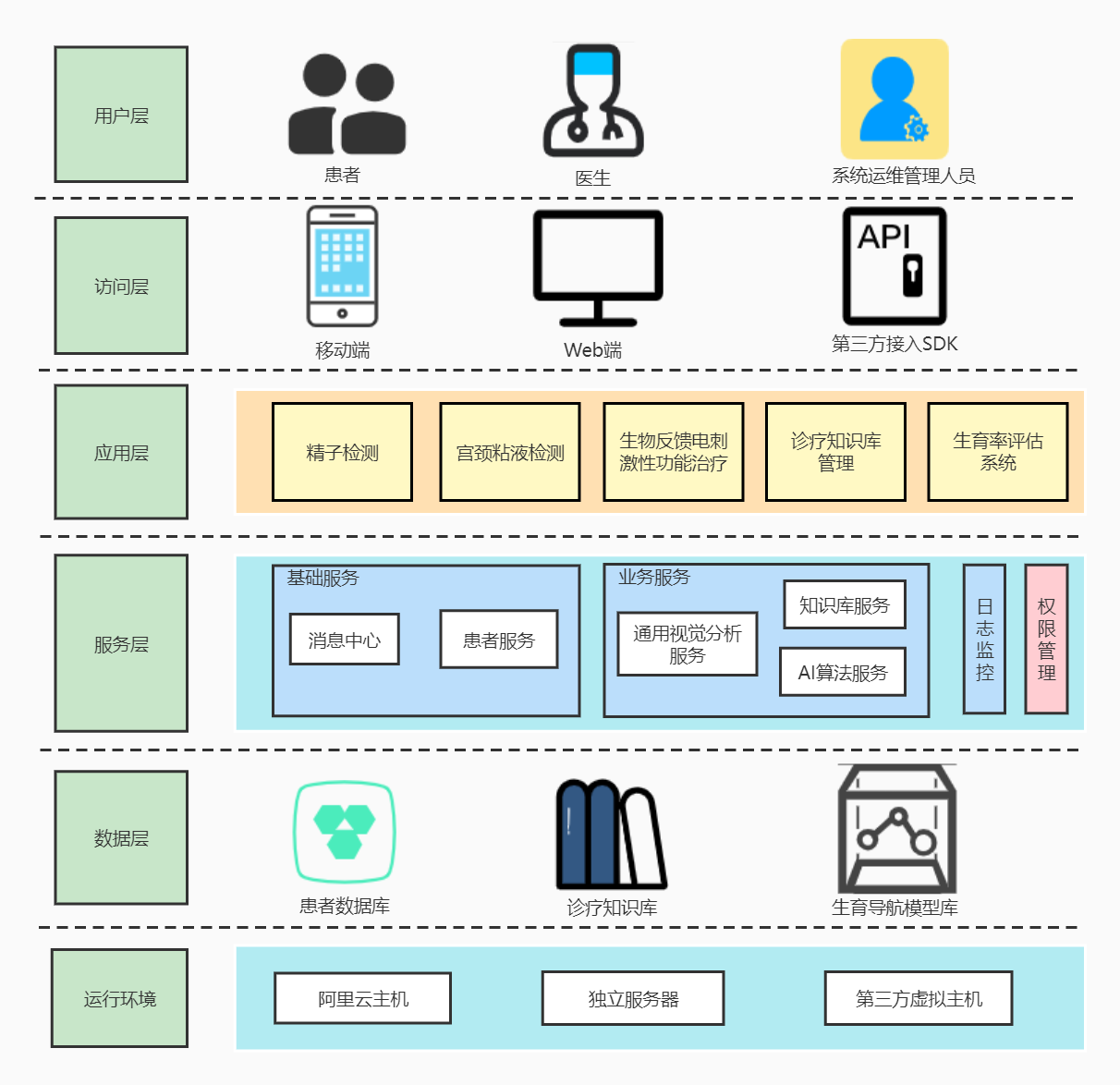
基于云计算的生育力评估系统架构设计

家用生育力评估系统

家用生育力评估APP界面
机器人定位🛬、导航技术研究与智能机器人研制
[4] Li Chuanjiang, Hu Ziwei, Zhu*Yanfei, Ji Xingzhao, Zhang Chongming, Qi Ziming. Lightweight and Fast Matching Method for Lidar-Inertial Odometry and Mapping[J]. International Journal of Robotics and Automation, 2024.

智能巡检机器人监控界面

危化品库区智能巡检机器人
复杂系统建模🚋、参数辨识和优化控制研究
[5]国家自然科学基金项目💐,61903050,具有不规则损失数据和不确定时延特性的复杂工业过程辨识方法研究,2020.01-2022.12;
[6]上海市自然科学基金,18ZR1428000,复杂网络下基于云计算的分布式协同云控制研究及应用🧻,2018.06-2021.05
[7]上海市科委自然科学基金项目🧎♂️,22ZR1445300⬆️🏋🏻♂️,大数据下具有多种特性的复杂工业过程系统辨识方法研究,2022.04-2025.03
智能机器人控制技术研究与产品研制
[8]Chang Zhanyuan, Wu Honglin, Li Chuanjiang. YOLOv4-tiny-based robust RGB-D SLAM approach with point and surface feature fusion in complex indoor environments[J]. Journal of Field Robotics, 2023, 40(3): 521-534.
[9]上海市科委青年科技英才扬帆计划项目👱,19YF1437200,数据融合与深度学习的轮式服务机器人复杂室内环境定位研究,2019.05-2022.04🤱🏿;
[10]Zhu Yanfei, Liu Hang, Li Chuanjiang*, Yu Jiahao. Consensus and security control of multi-agent systems based on set-membership estimation with time-varying topology under deception attacks[J]. International Journal of Control, Automation and Systems, 2022,20(11):3624-2633.


自主研发的智能服务机器人投入应用